原文来自自己很早前写的一篇公众号文章:Rethinking DQN
Playing Atari with Deep Reinforcement Learning
为什么增加Replay Memory有效?
- 一个样本可能被多次随机采样到,在多次权重更新中被使用,多次学习,局部策略学习更有效
- 直接学习连续的游戏帧样本,前后帧之间存在强的相关性,从memory中随机采样打破了这种相关性
- Replay Memory相当于使用Replay Memory长度时间的behaviour分布,避免使用当前时刻behaviour出现震荡和局部最优
针对第3点,避免陷入局部最优和震荡的情况(比如陷入 往左->update Q->max Qaction->往左 这种局部循环),Replay Memory需要使用off-policy的策略,所以选择Q Learning
- on-policy: when learning on-policy the current parameters determine the next data sample that the parameters are trained on
- off-policy: current parameters are different to those used to generate the sample DQN中因为要积累batch,使用Experience Replay,所以是典型off-policy的
DQN输入预处理方法:
- RGB -> GrayScale
- resize,然后切掉游戏背景的黑边,最后size从(210,160)变成(84.84)
- 使用最近的4帧作为输入,因此输入为4x84x84
关于Reward:
- 由于原文准备在不同的游戏上使用相同的架构和学习参数,所以把正reward都设成1,负reward都设成0,0 reward不变。用这种截断reward的方式,限制了error的范围,从而可以使用相同的学习率参数
- 上面这种截断reward的方式对性能有一定的影响
优化方法:
- RMSProp with batchsize=32
- e-greedy的阈值概率:前面100 0000(1 million)帧从1到0.1线性变化,后面帧保持0.1不变
- Replay memory的大小:最新的1 million帧
- frame-skipping technique
怎么看训练结果好坏,训练时要打印什么东西观察收敛情况?
- the total reward the agent collects in an episode or game averaged over a number of games,即每个episode(每一局)的reward变化。该度量方法结果会存在很大的noise或者说震荡,比如下面的左边两张图
- 更稳定的度量方式是:the policy’s estimated action-value function Q, which provides an estimate of how much discounted reward the agent can obtain by following its policy from any given state。如下面的右边两张图,即Q*

Human-level control through deep reinforcement learning
在上一篇的基础上改进:target network和Qnetwork使用不同的参数
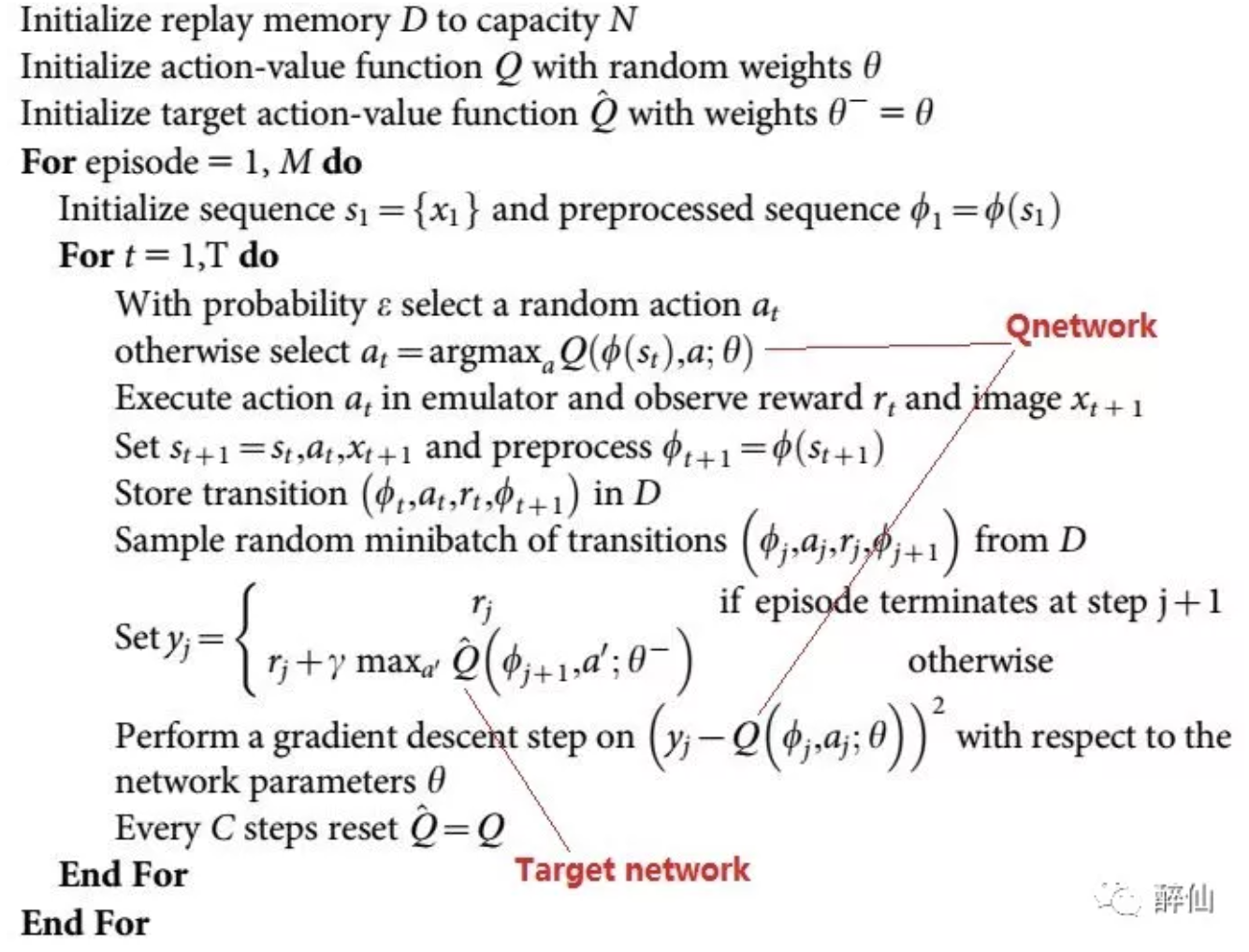
大部分处理方式和上篇文章一样,增加了1点:
- error term clip:error截断到-1到1之间。这种处理的效果类似于使用了加绝对值的loss函数 思考:使用HuberLoss是不是可以起到限制loss发散的效果?
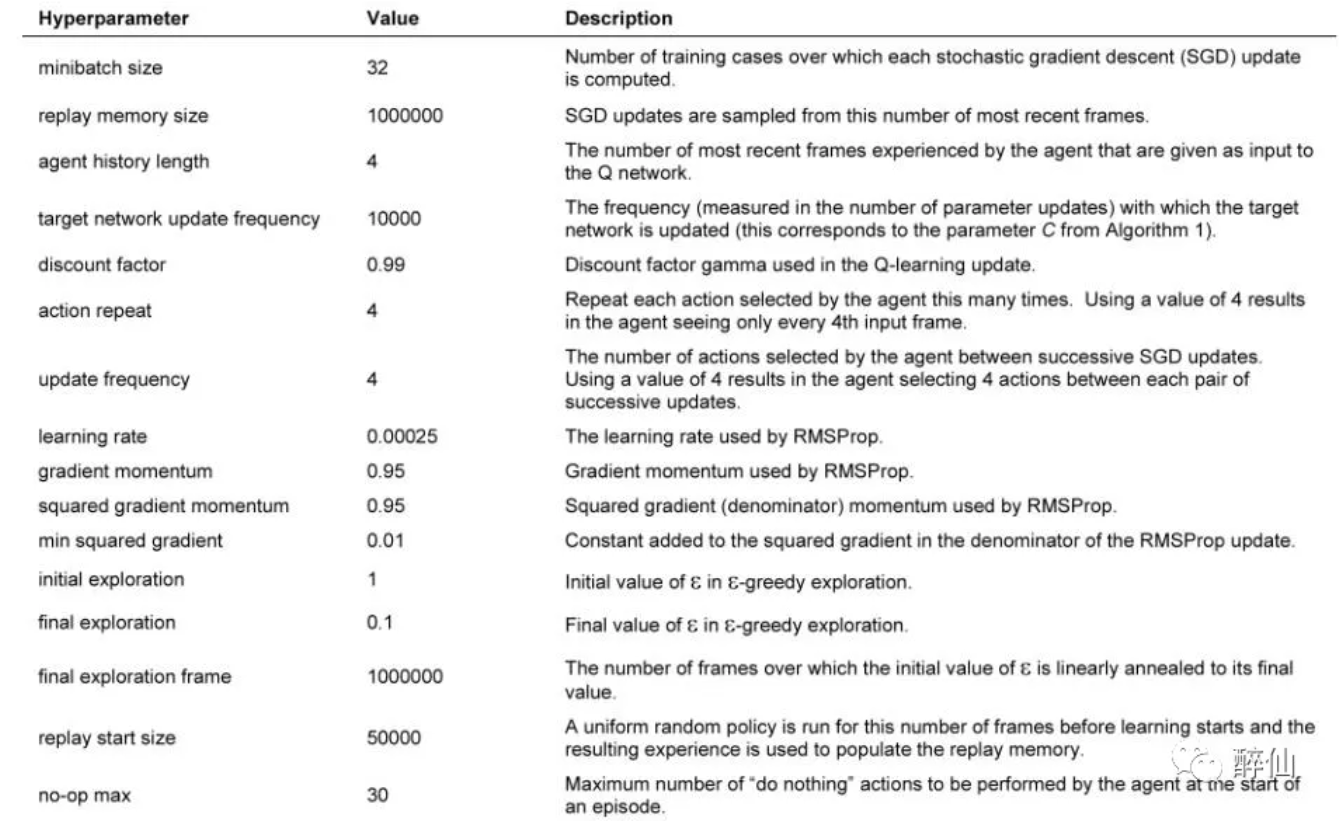
另外,这篇文章附录部分有一个表格描述使用的参数,实训过程可能有参考价值,
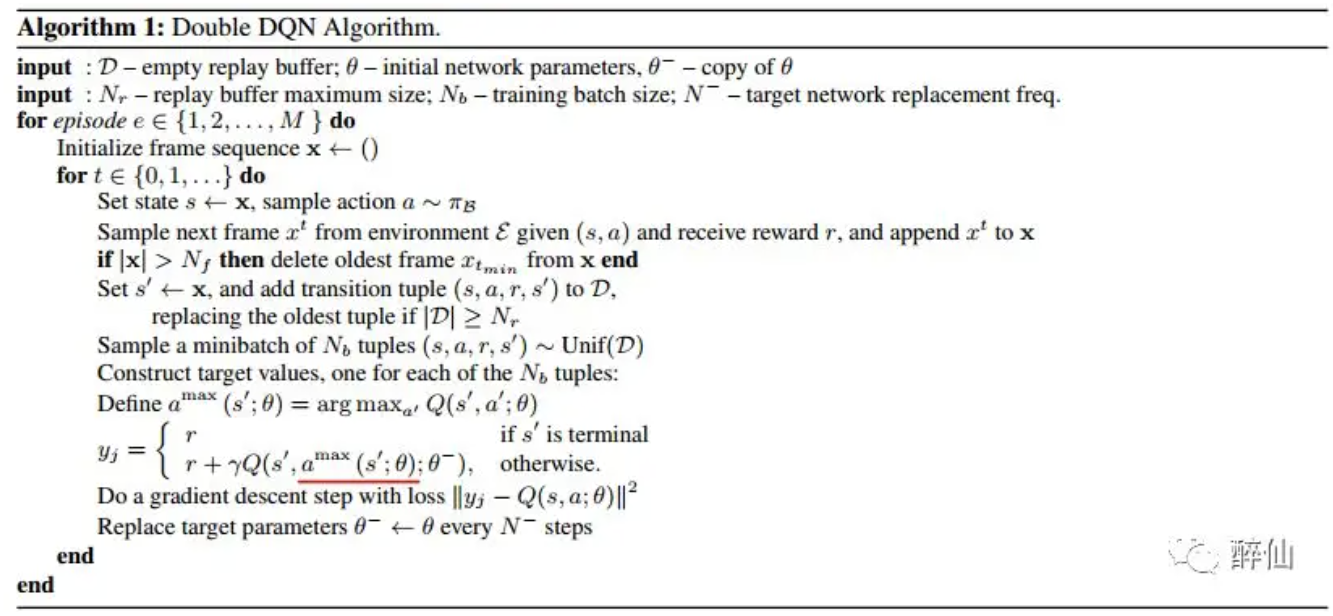
Deep Reinforcement Learning with Double Q-learning
DQN里面的核心其实是Q网络的标签y计算的问题,而y的计算是通过Bellman公式得到的。 最早的Bellman公式其实是计算期望(从某个状态s可切换到多个下一状态s’),
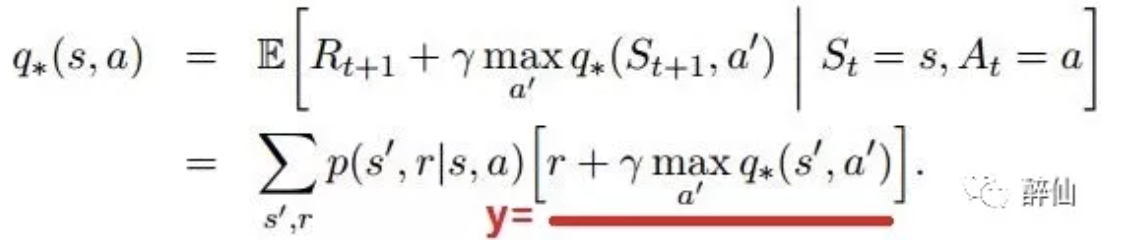
但在Nature和Atrai文章中,因为都是使用s’中的某一个样本来训练,即(s,a,s’,r)四元组,所以 y的计算就变成上面划横向的部分。 Bellman公式很容易理解:预测从下一状态开始到结束q(s,a),就是从s->s’的reward+下一状态之后的最大q(s’,a')
在DQN中这里的q都是是使用target net计算的
DDQN则实际上是对上面公式的改进。DDQN认为Bellman中直接使用target net计算下一(s’,a’)的q,容易与y耦合。因此改成online的Qnet来选择下一状态action计算Q

注意上面的θ和θ-分别代表oneline network和target network。
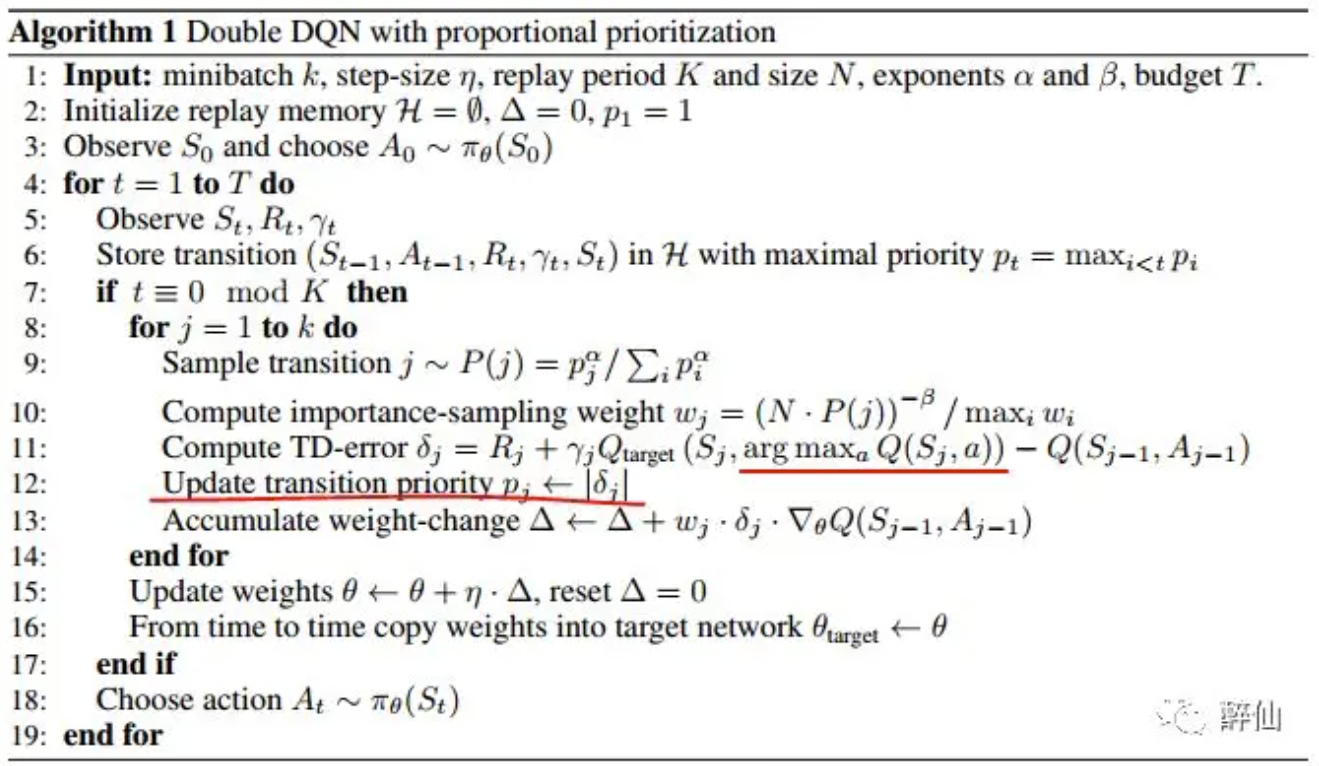
Prioritized Experience Replay
比较于DDQN,PER改进Experience Replay
原文根据TD-error给结果一个抽中的概率,从下面算法看,TD-error的计算跟DQN中loss的计算基本一致